Open Source Force Sensor

We have developed open source force sensor designs to enable researchers to study tool-tissue force interactions in minimally invasive surgical robotics. Our goal is facilitate the study of haptic feedback, tissue handling skill coaching and evaluation, and data-driven force estimation methods.
Open Source Force Sensor for Minimally Invasive Robotics Research
Single Manipulator Surgical Tissue Manipulation Dataset
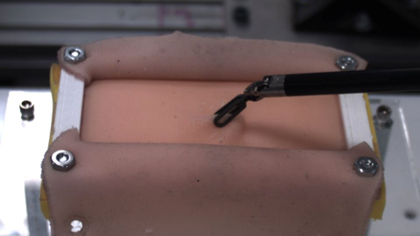
The Single PSM Simple Tissue Phantom Dataset is a multimodal dataset of teleoperate manipulations performed using only the right patient side manipulator (PSM) from a da Vinci Research Kit on a silicone tissue phantom stretched over a sponge base layer. The data are collected in different robot and camera configurations relative to the tissue stage, with different surgical tools (Cadiere and Maryland Bipolar forceps) and with different silicone material (Limbs and Things tissue and DragonSkin).